Soru: 2 ayaklı bir robotu yürüten ardunio kodunu verir misiniz? ( Not: her adımda 30 derece ilerlemeli ve GND ile 5V pininin istediğiniz yere bağlayıp belirtirseniz sevinirim) *****!"""""100 puanlık"""""!*****
-

Konu:
Bilgisayar -
Yazar:
loosetooth -
Oluşturulma Zamanı:
1 yıl önce
Cevaplar 1
#define echoPin 12 //Ultrasonik sensörün echo pini Arduino'nun 12.pinine
#define trigPin 13 //Ultrasonik sensörün trig pini Arduino'nun 13.pinine tanımlandı.
#define MotorR1 7
#define MotorR2 6
#define MotorRE 9 // Motor pinlerini tanımlıyoruz.
#define MotorL1 5
#define MotorL2 4
#define MotorLE 3
long sure, uzaklik; //süre ve uzaklık diye iki değişken tanımlıyoruz.
void setup() {
// ultrasonik sensör Trig pininden ses dalgaları gönderdiği için OUTPUT (Çıkış),
// bu dalgaları Echo pini ile geri aldığı için INPUT (Giriş) olarak tanımlanır.
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorRE, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW); //sensör pasif hale getirildi
delayMicroseconds(5);
digitalWrite(trigPin, HIGH); //Sensore ses dalgasının üretmesi için emir verildi
delayMicroseconds(10);
digitalWrite(trigPin, LOW); //Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi
sure = pulseIn(echoPin, HIGH); //ses dalgasının geri dönmesi için geçen sure ölçülüyor
uzaklik = sure / 29.1 / 2; //ölçülen süre uzaklığa çevriliyor
Serial.println(uzaklik);
if (uzaklik < 15) // Uzaklık 15'den küçük ise,
{
geri(); // 150 ms geri git
delay(150);
sag(); // 250 ms sağa dön
delay(250);
}
else { // değil ise,
ileri(); // ileri git
}
}
void ileri(){ // Robotun ileri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 150); // Sağ motorun hızı 150
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void sag(){ // Robotun sağa dönme hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 0); // Sağ motorun hızı 0 (Motor duruyor)
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void geri(){ // Robotun geri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, LOW); // Sağ motorun ileri hareketi pasif
digitalWrite(MotorR2, HIGH); // Sağ motorun geri hareketi aktif
analogWrite(MotorRE, 150); // Sağ motorun hızı 150
digitalWrite(MotorL1, LOW); // Sol motorun ileri hareketi pasif
digitalWrite(MotorL2, HIGH); // Sol motorun geri hareketi aktif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
-
Yazar:
jasonnxiv
-
Bir cevabı oylayın:
8
Cevabı biliyor musunuz? Buraya ekleyin!
Size yardımcı olabilecek diğer ilgili sorular
-
Yazar:
nikita38
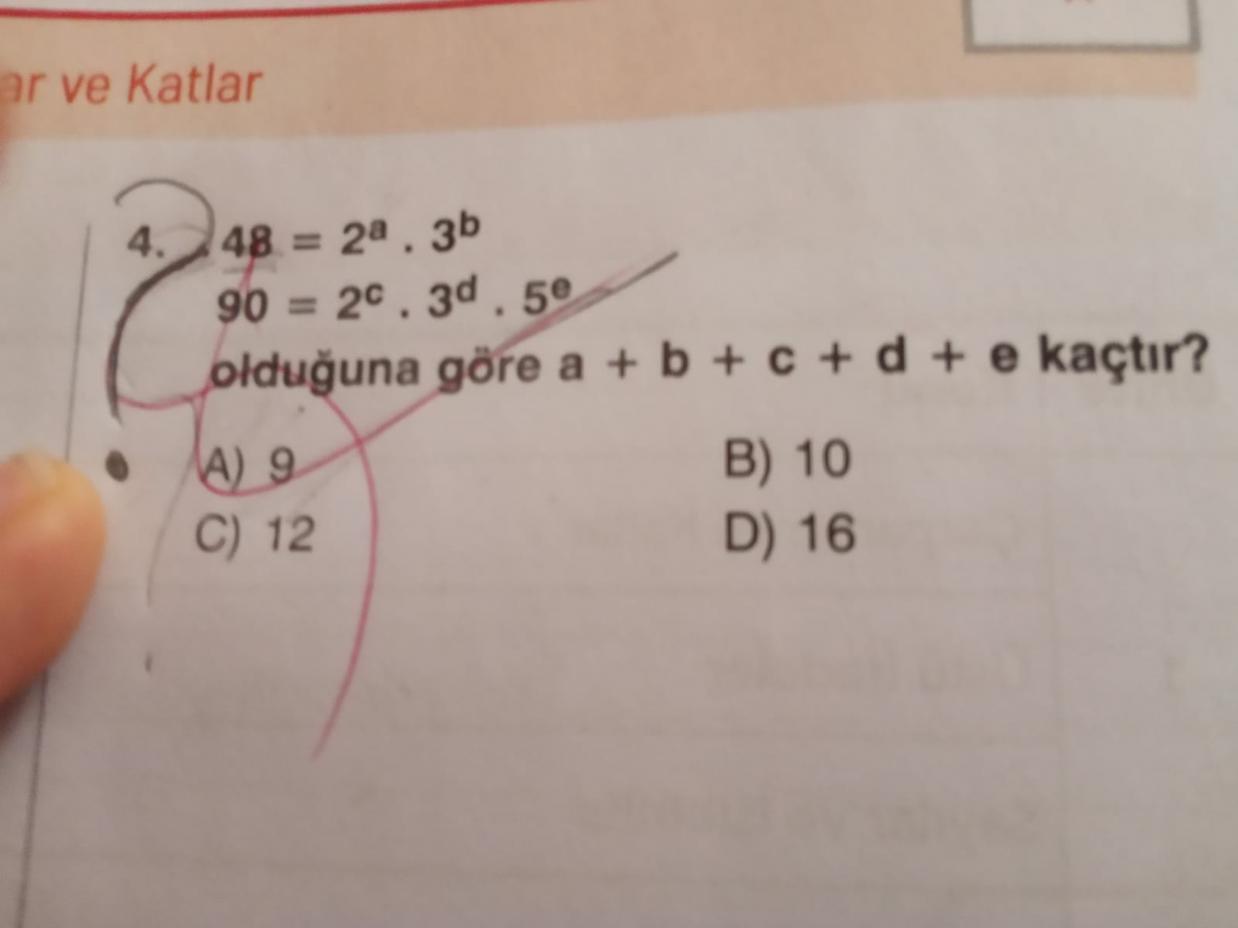
Cevap:
c
Adım adım açıklama:
umarım anlisilir olmuştur.
-
Yazar:
loser4pnn
-
Bir cevabı oylayın:
2
Cevap:
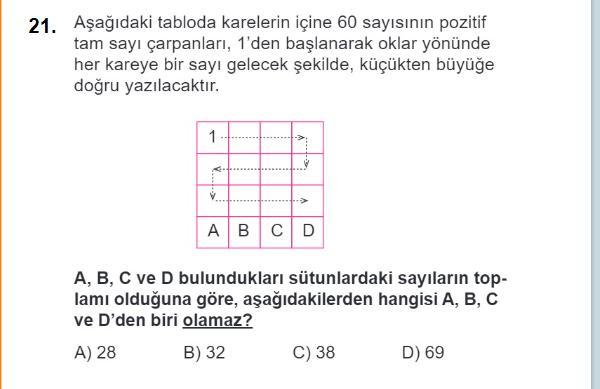
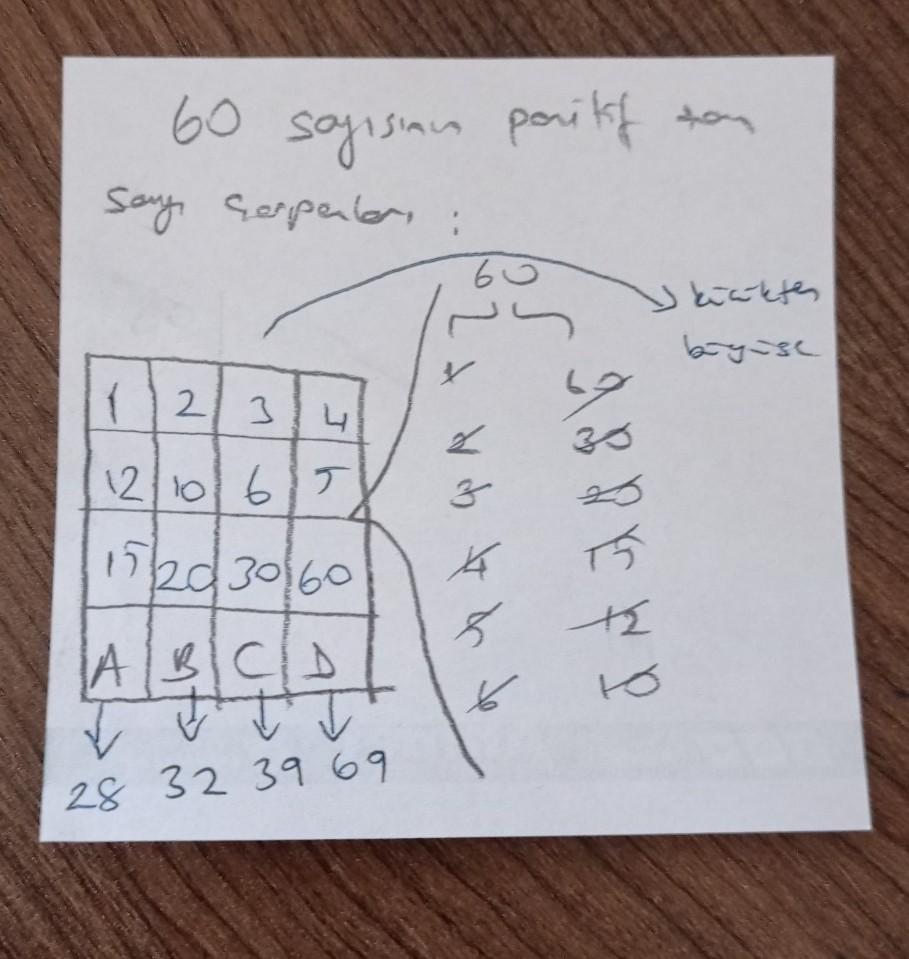
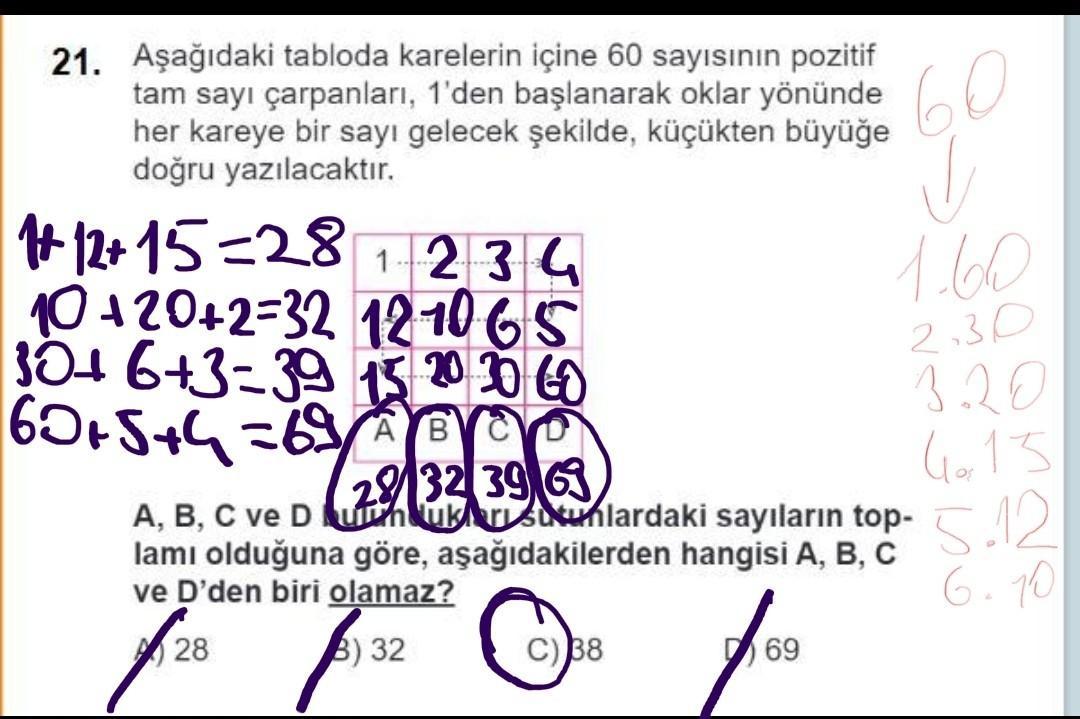
C şıkkı 38.
Adım adım açıklama:
60 sayısının pozitif tam sayı çarpanlarını hesapladım ve ok yönünde sırayla küçükten büyüğe yazdım. Yukarıdan aşağıya sütunları topladım ve 28-32-39-69 çıktı. Cevap 38 oldu. Umarım yardımcı olmuşumdur.
İYİ DERSLER!
-
Yazar:
virgilio4ct7
-
Bir cevabı oylayın:
6
-
Yazar:
antonio
-
Yazar:
dottieozxc
-
Bir cevabı oylayın:
3
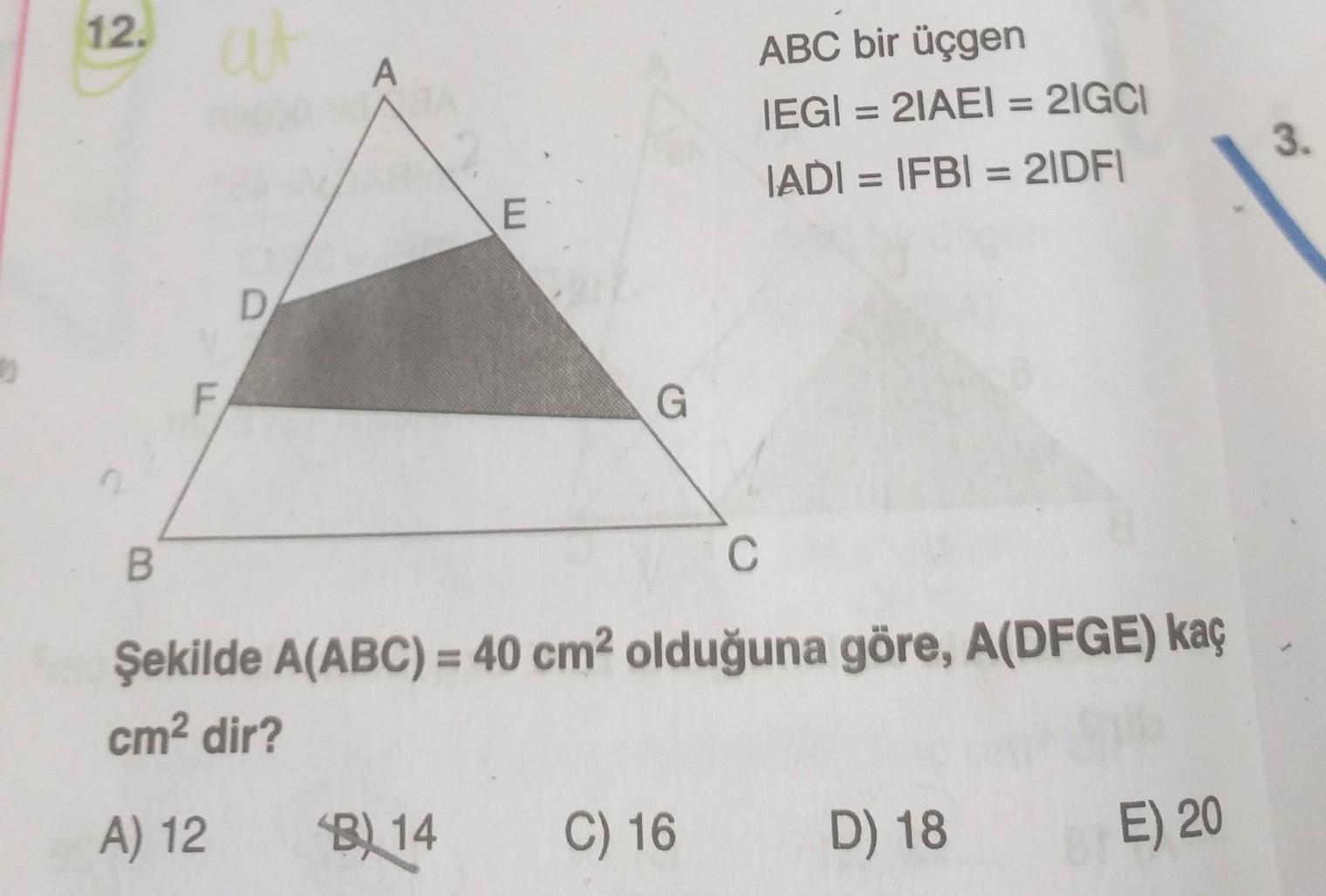
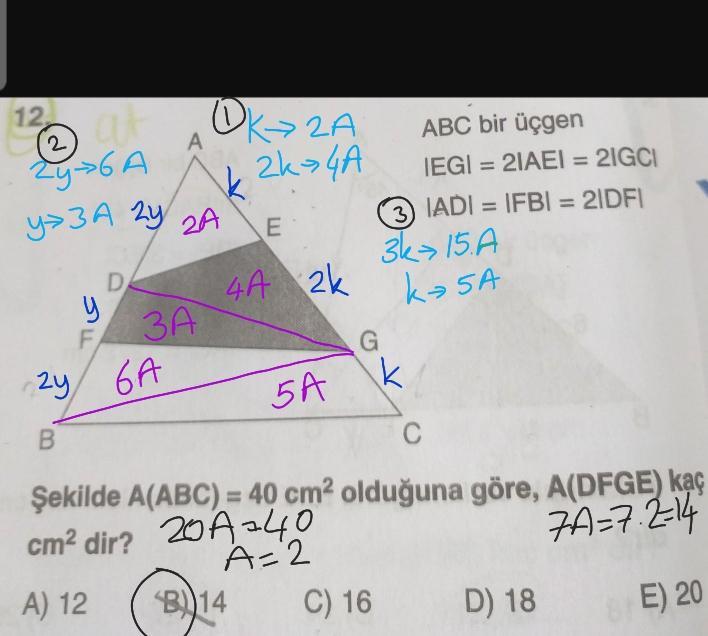
Cevap:
14
Adım adım açıklama:
-
Yazar:
cesar711
-
Bir cevabı oylayın:
16
-
Yazar:
tequila
kolay gelsin anlamadığınız yer varsa açıklayabilirim
-
Yazar:
heidyterrell
-
Bir cevabı oylayın:
10
-
Yazar:
serena
kolay gelsin anlamadığınız yer varsa sorun lütfen
-
Yazar:
delilahzyml
-
Bir cevabı oylayın:
16
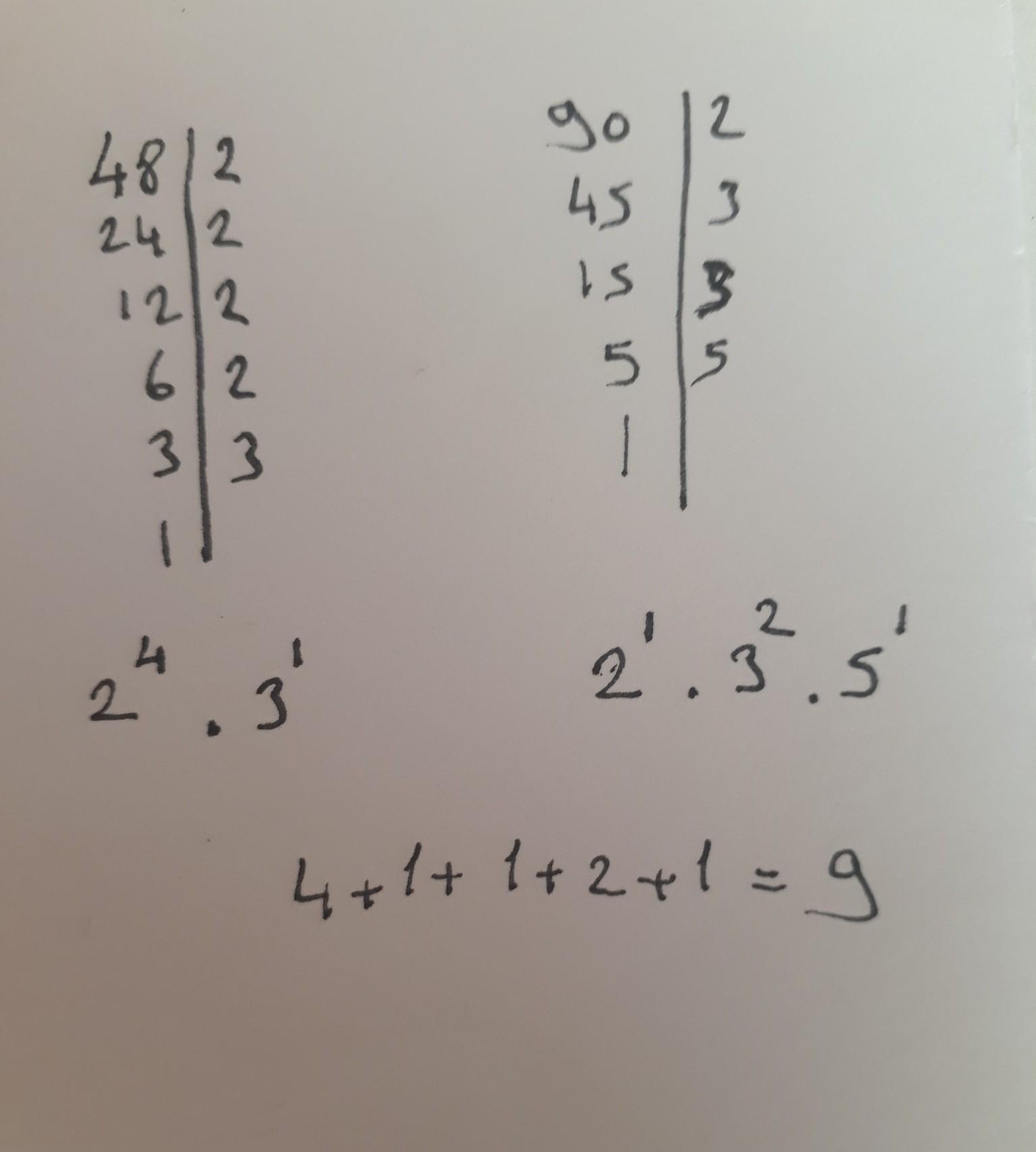
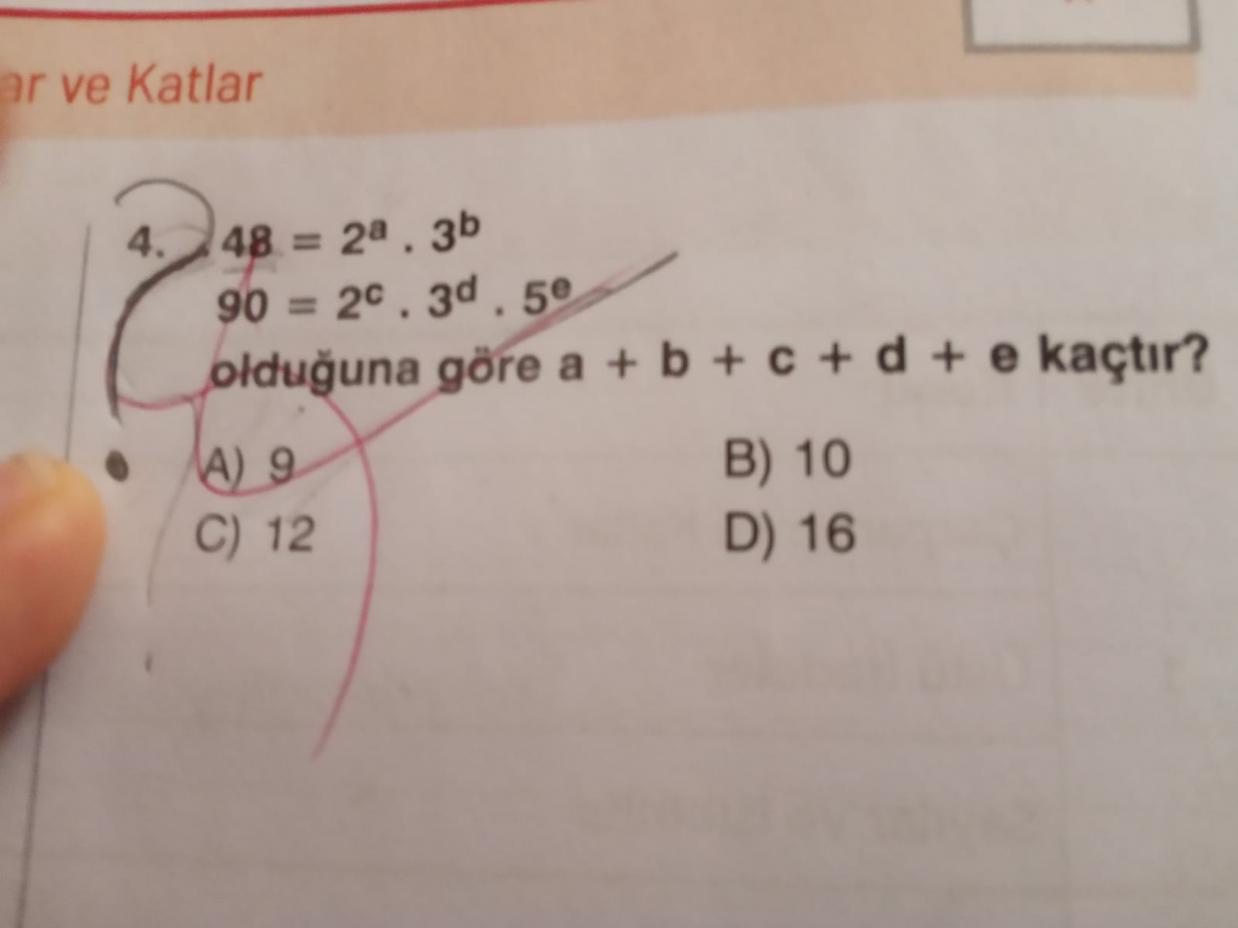
Cevap:
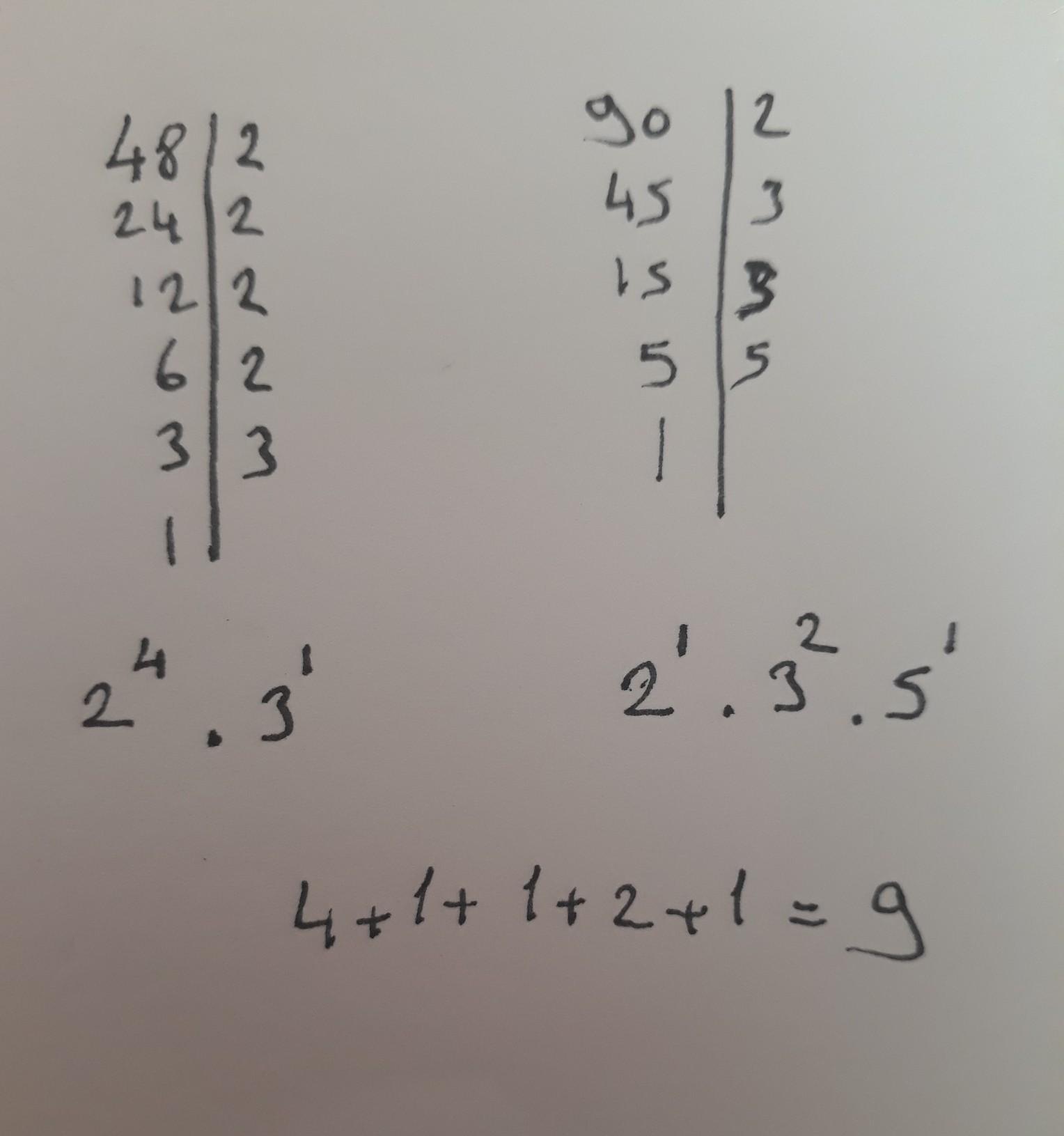
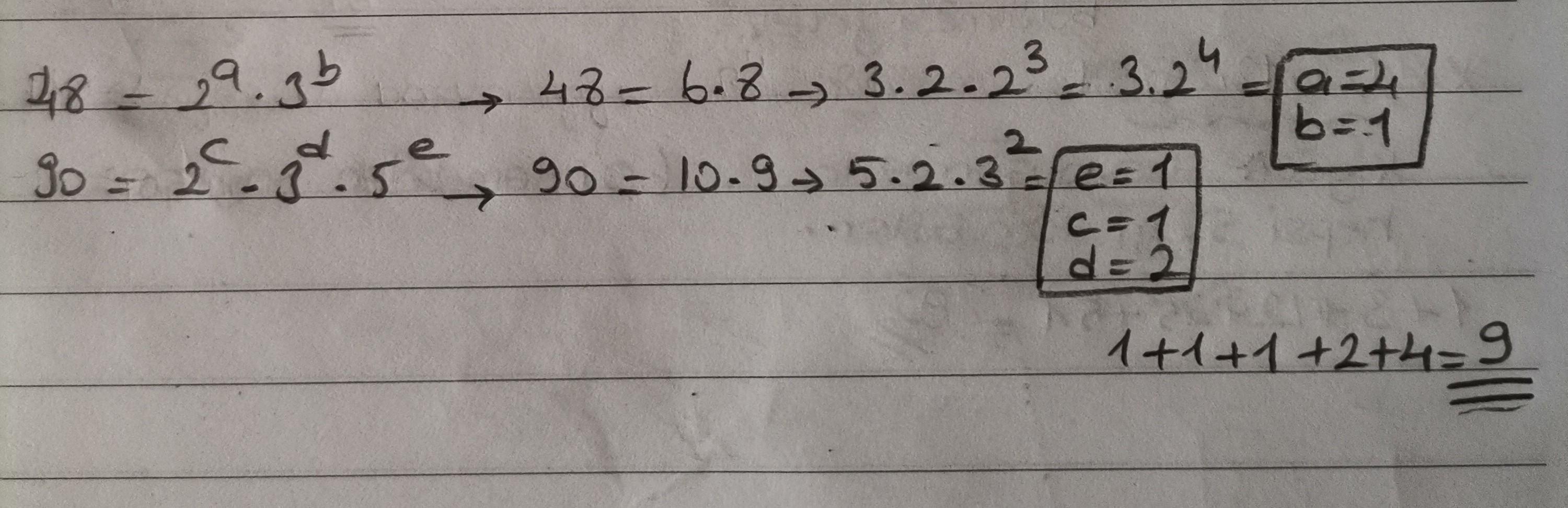
Sayıları çarpanlarına ayırmamız yeterli kolay gelsin :)
-
Yazar:
maggiedpzi
-
Bir cevabı oylayın:
7