Soru: bu soru çok saçma lütfen yardım edin 20 p

Cevaplar 2
Cevap:
Cevap:
c
Adım adım açıklama:
umarım anlisilir olmuştur.
-
Yazar:
loser4pnn
-
Bir cevabı oylayın:
2
Cevap:
Cevap:
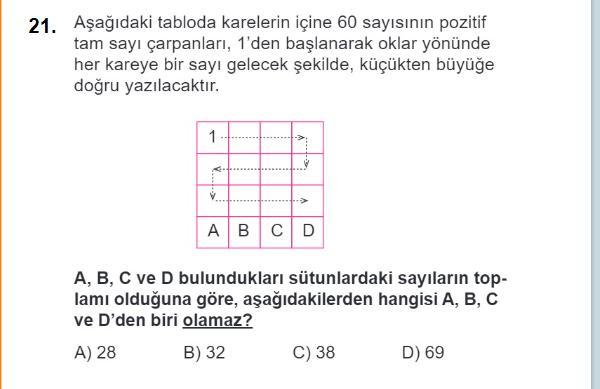
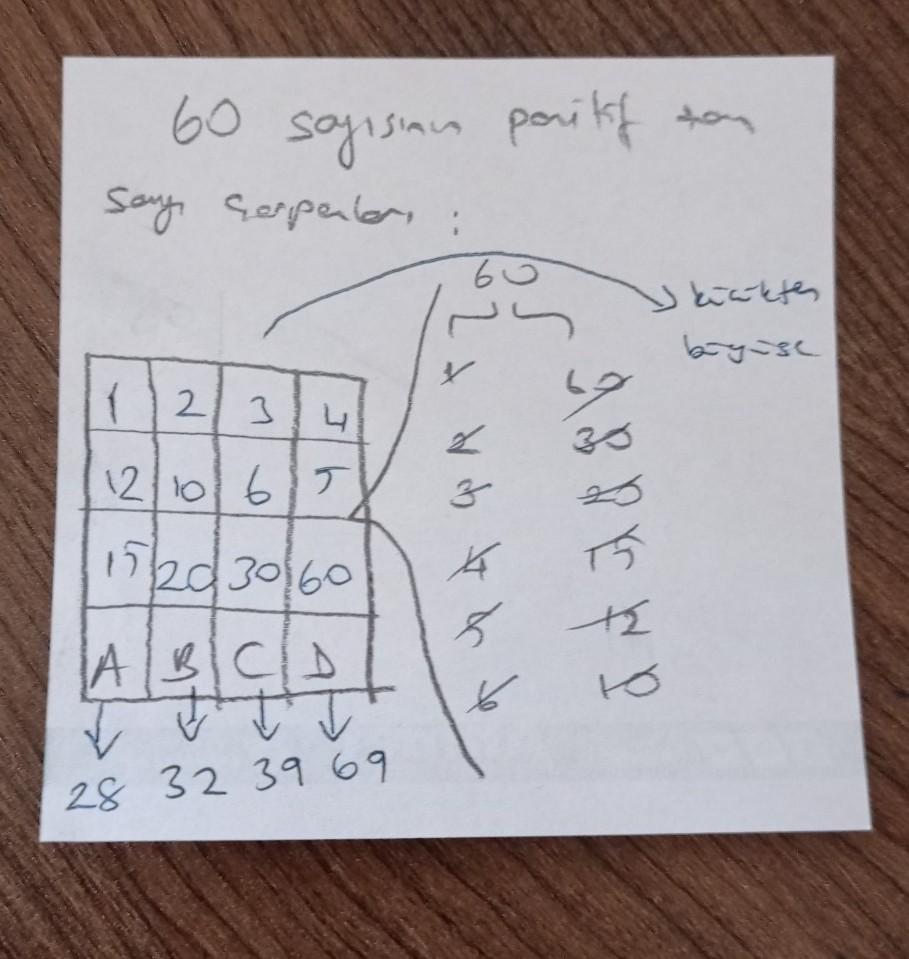
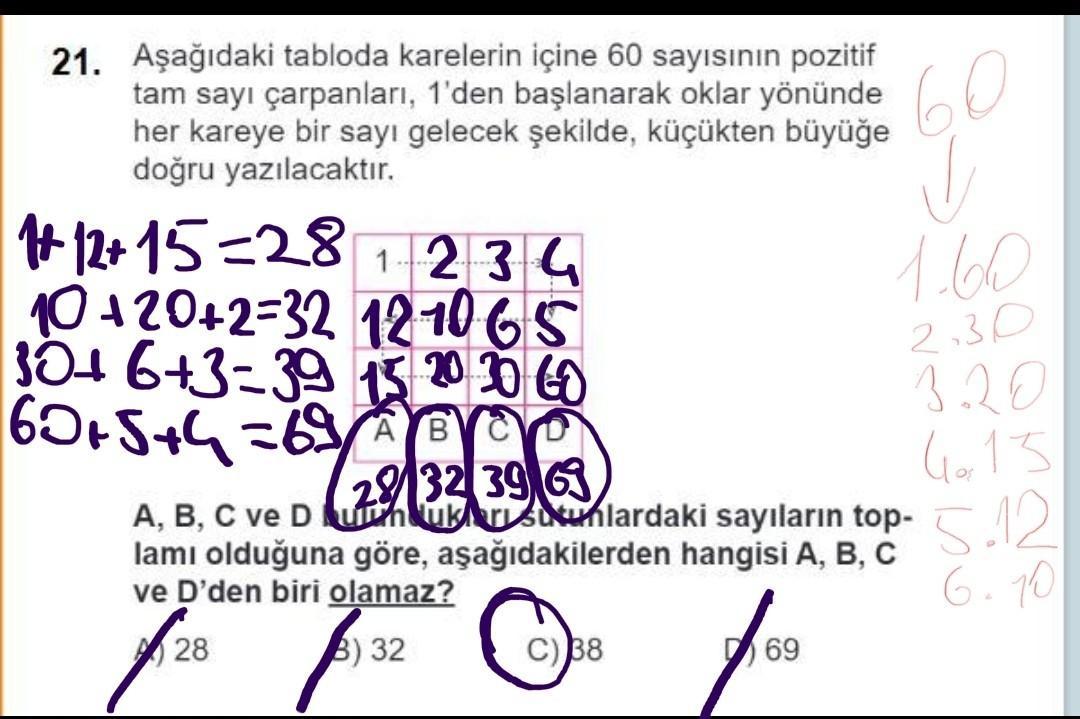
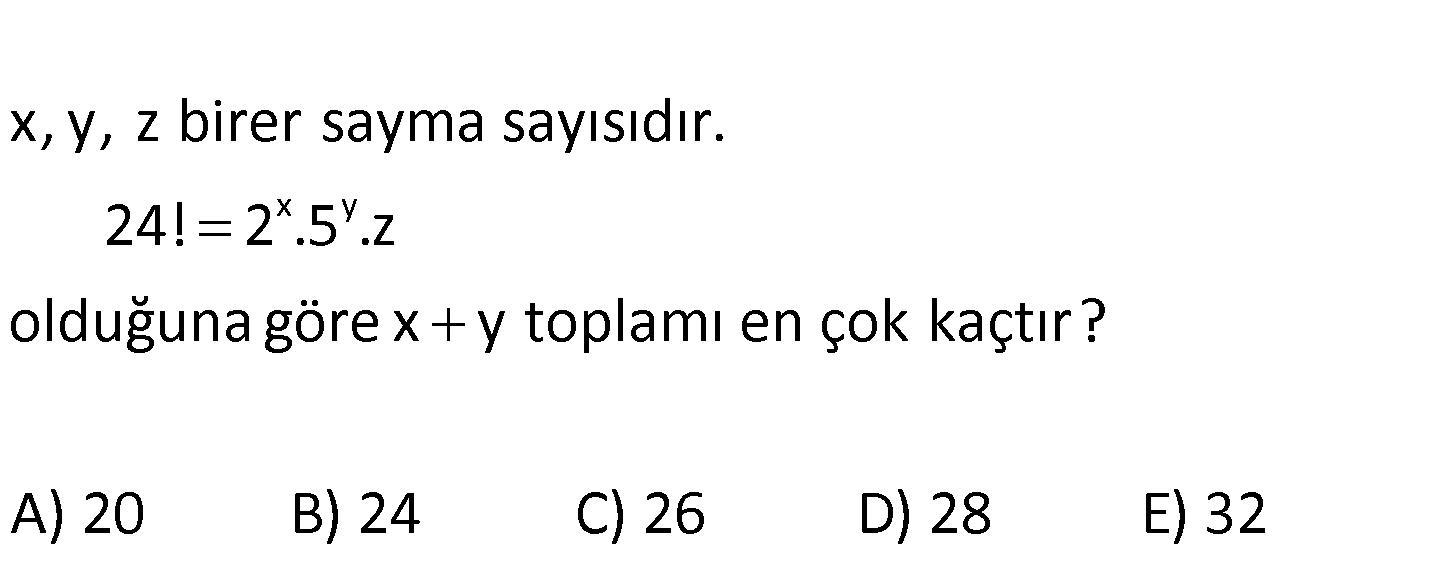
C şıkkı 38.
Adım adım açıklama:
60 sayısının pozitif tam sayı çarpanlarını hesapladım ve ok yönünde sırayla küçükten büyüğe yazdım. Yukarıdan aşağıya sütunları topladım ve 28-32-39-69 çıktı. Cevap 38 oldu. Umarım yardımcı olmuşumdur.
İYİ DERSLER!
-
Yazar:
virgilio4ct7
-
Bir cevabı oylayın:
6
Cevabı biliyor musunuz? Buraya ekleyin!
Size yardımcı olabilecek diğer ilgili sorular
İşlemi İle Acil Yaparmisiniz NOT: İŞLEMİ İLE YAPIN
-
Yazar:
velazquez
Adım adım çözümledim
-
Yazar:
kodyyqvx
-
Bir cevabı oylayın:
5
Sorunun cevabı 26. Ezberletilen yöntemle bulmak kolay ama ispatını yapabilecek biri var mı?
-
Yazar:
bernardo
-
Yazar:
popcornfa5t
-
Bir cevabı oylayın:
2
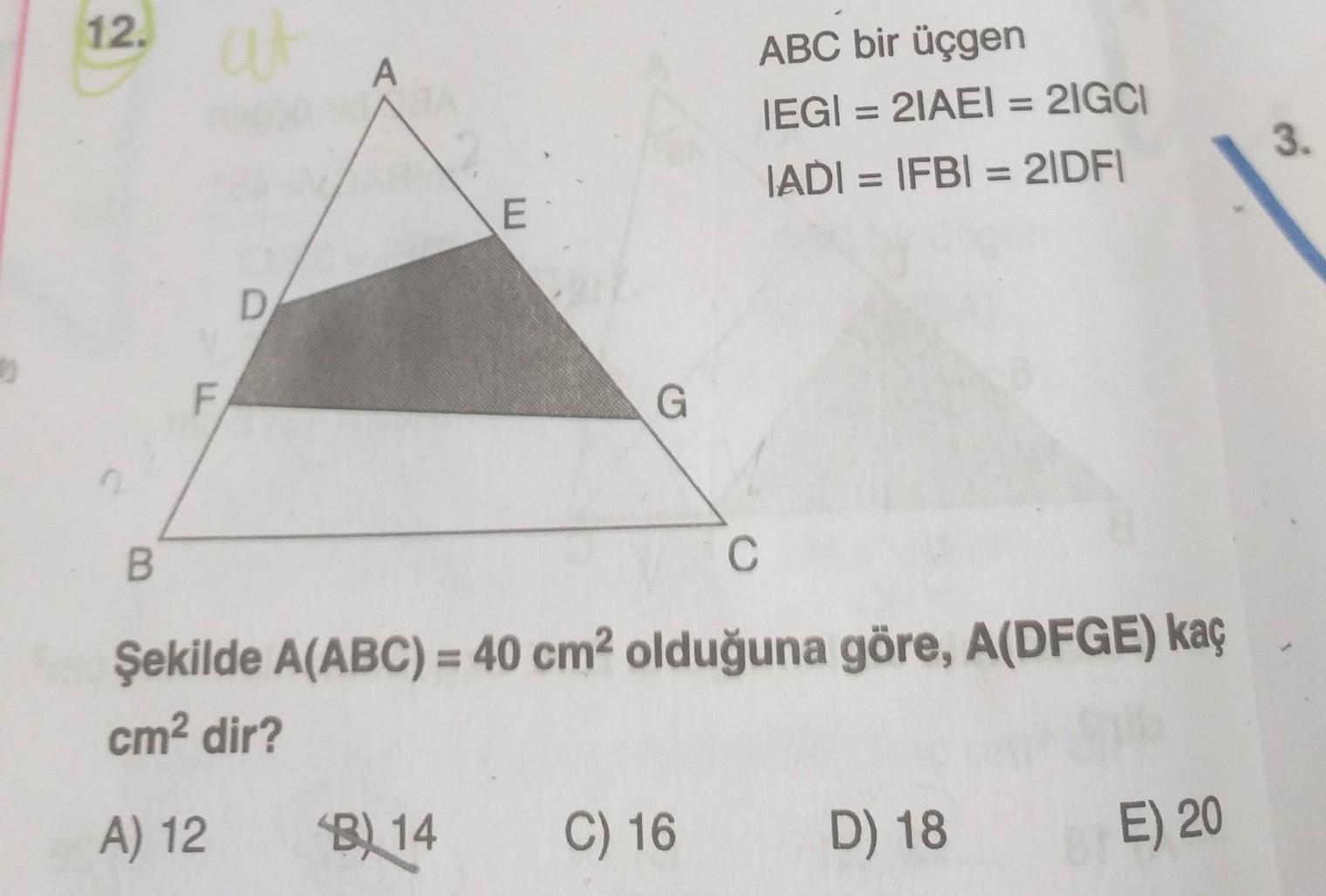
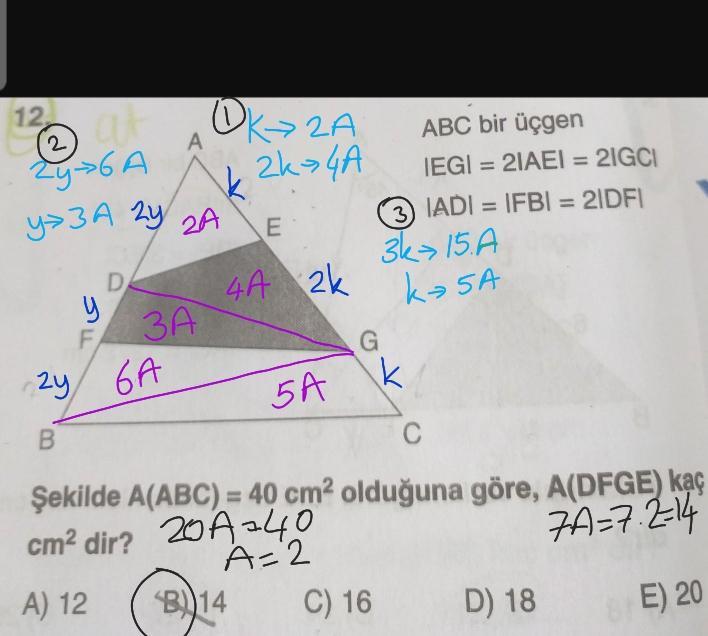
n 12. B F D A E B) 14 G C Şekilde A(ABC) = 40 cm² olduğuna göre, A(DFGE) kaç cm² dir? A) 12 ABC bir üçgen IEGI = 21AEI = 2IGCI IADI= IFBI = 21DFI C) 16 D) 18 8E) 20 3.
-
Yazar:
antonio
-
Yazar:
dottieozxc
-
Bir cevabı oylayın:
3
Cevap:
14
Adım adım açıklama:
-
Yazar:
cesar711
-
Bir cevabı oylayın:
16
2 ayaklı bir robotu yürüten ardunio kodunu verir misiniz?
( Not: her adımda 30 derece ilerlemeli ve GND ile 5V pininin istediğiniz yere bağlayıp belirtirseniz sevinirim) *****!"""""100 puanlık"""""!*****
-
Yazar:
loosetooth
-
Yazar:
jasonnxiv
-
Bir cevabı oylayın:
8
Bir dil veya bölge seçin
How much to ban the user?
1 hour
1 day
100 years